Architecture
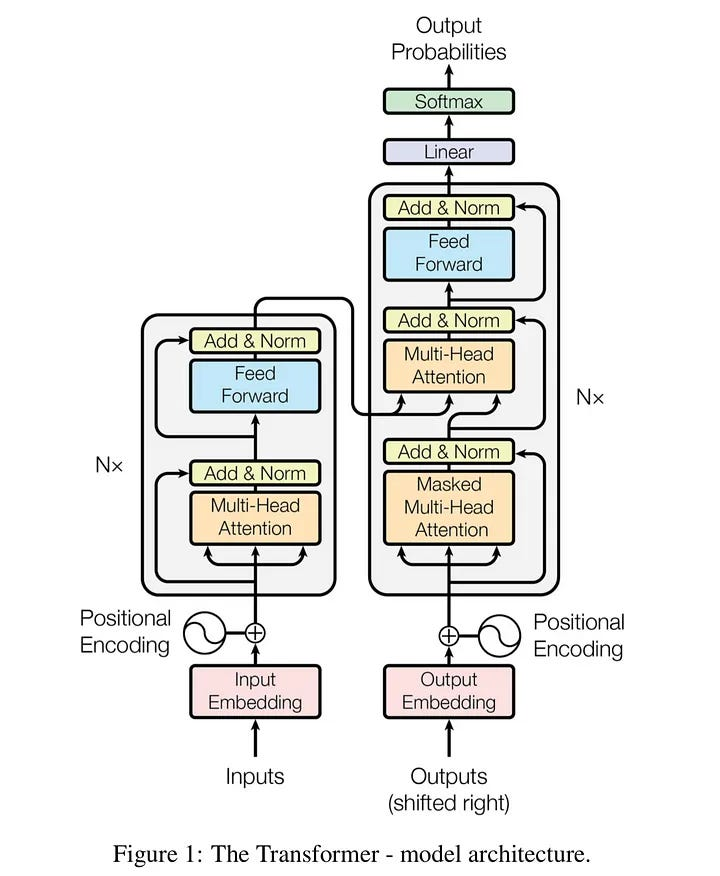
Architecture Detail
Self-Attention
自注意力机制允许模型在处理一个词时,权衡输入序列中其他所有词的重要性。它通过为序列中的每个词计算一个“注意力分数”来实现这一点,从而动态地决定关注哪些词。
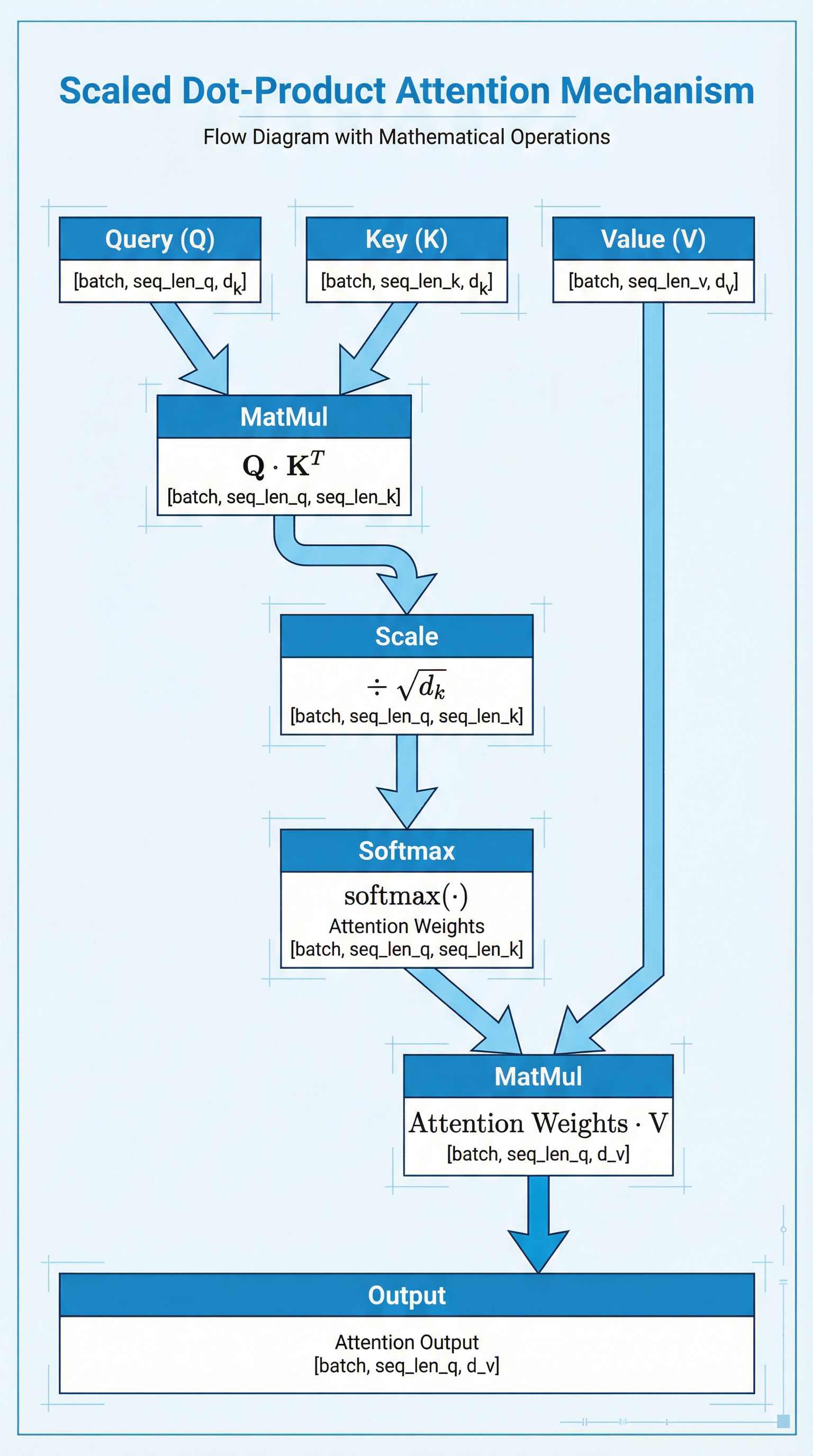
self-attention的实现方式是Scaled Dot-Product Attention,核心是三个向量,; 这三个向量分别代表 Query - “我在寻找什么信息”,Key - “我能提供什么信息”,Value - “我包含的信息内容”;
单词向量(通过Embedding而来)
Hint
打个比方: 你去图书馆找书(Query),书架上的标签就是 Key。当你发现某个标签和你的需求匹配时,你拿走的书中内容就是 Value。
具体计算过程,
- 计算相似度: 将每个查询向量 Q 与所有键向量 K 进行点积,得到注意力分数。点积结果越高,说明这两个词越相关。
- 缩放(Scaling),将Score除以sqrt(d_k)(d_k是键向量的维度)以稳定梯度。
- 归一化(Softmax),将Scpre转化为0-1的概率分布,代表每个单词对当前单词的“重要程度”;(Softmax后得到Attntion Weights,每一行都代表当前单词和剩下单词的关联程度的概率分布,每一行 sum = 1)
- 加权求和(MatMul),将得到的权重乘以对应的 Value () 并求和。这样得到的向量就融合了全句的信息。
即,
Tip
Self-Attention有的优势在于,
- 捕捉长距离依赖: 无论两个词离多远,计算复杂度都是常数级别的
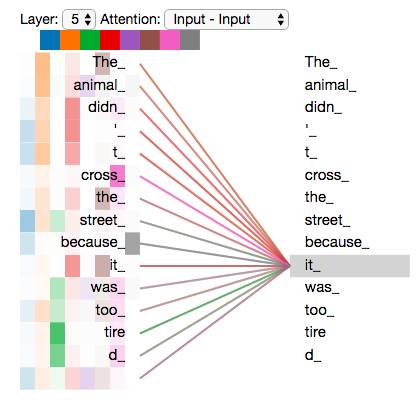
- 消除歧义: 比如在“The animal didn’t cross the street because it was too tired”中,自注意力会让 “it” 更多地关注 “animal”,而不是 “street”。
- 并行化: 不需要像 RNN 那样等待前一个词算完,所有词可以同时计算。
Self-Attention具体计算过程见:self_attention_example
Multi-Head Attention
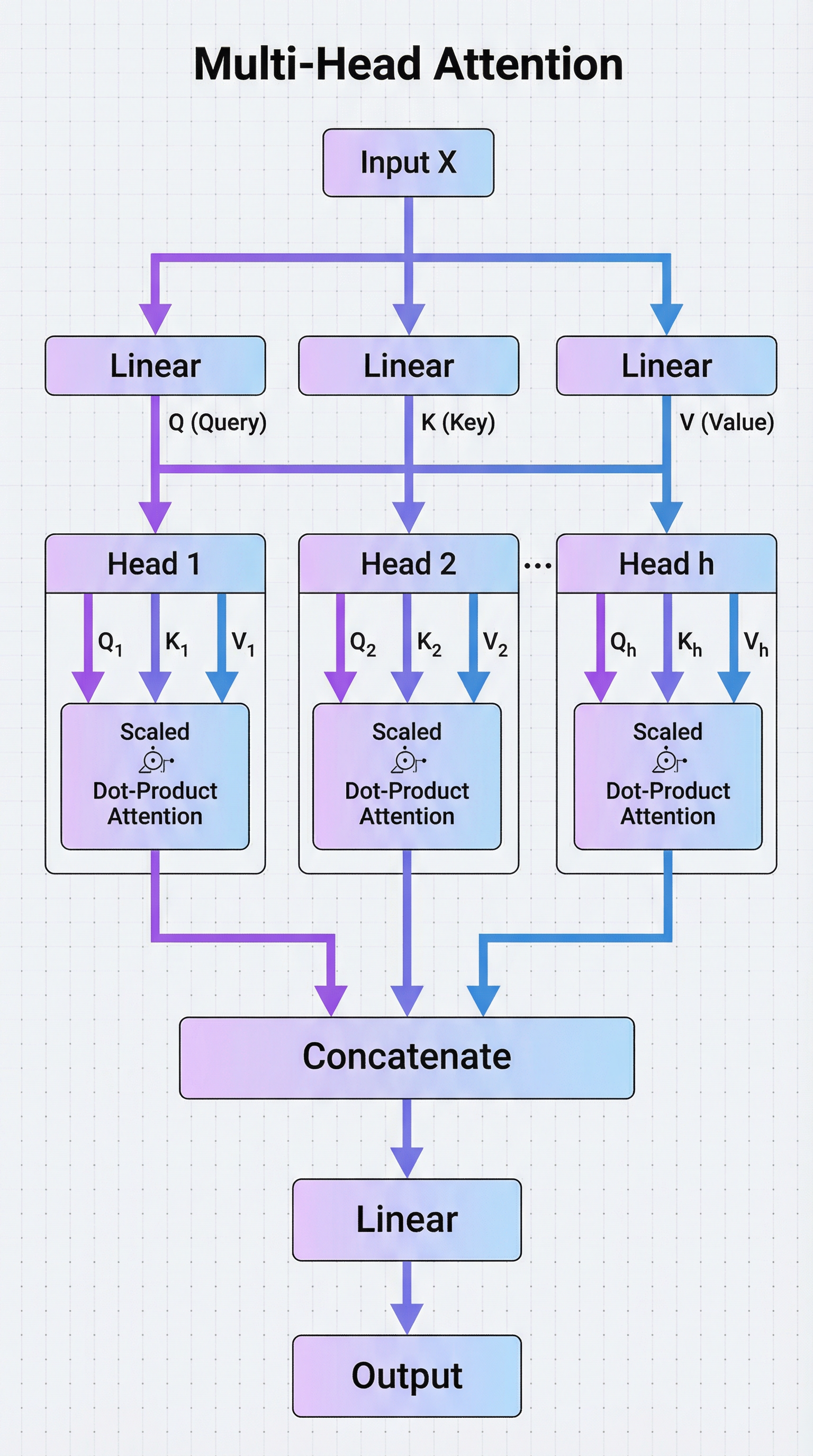
单头注意力只能从一个“视角”来关注信息。为了让模型能从多个不同的角度理解数据(例如,同时关注语法结构、语义关系等),Transformer引入了多头注意力。
它通过在多个“子空间”中并行进行注意力计算来实现。每个头独立学习不同的注意力模式,然后将所有头的输出拼接起来,通过一个线性变换得到最终结果。
具体例子见:multi_head_attention
Positional Encoding
Traditional Positional Encoding
Positional Encoding的传统做法(《Attention Is All You Need》原论文中)如下:
- 单词变向量:
- 生成位置向量:
- 暴力相加:
其中,位置向量不是通过简单的 (数值会无限变大,破坏权重),也不想用训练式的 Embedding(当时认为这无法处理比训练集更长的句子)。
对于第 个位置(比如第 5 个词),它的位置向量 的第 个维度(偶数维度用 sin,奇数维度用 cos)的计算方式是:
- : 单词在句子中的位置(0, 1, 2…)。
- : 向量维度的索引。
- : 向量的总维度(比如 512)。
为了理解这个公式,别看数学,看物理逻辑。 想象一下我们要用数字表示位置:
-
十进制: 0, 1, 2, …, 9, 10 (个位变了,十位才变)。
-
二进制:
- 000
- 001 (最后一位变化最快)
- 010 (中间位变化慢一点)
- 011
- 100 (第一位变化最慢)
Transformer 的这套公式,其实就是连续版本的二进制。
- 低维度( 很小): 分母小,频率高。正弦波震荡得非常快。这就像时钟的秒针,稍微动一下位置,数值就变了。
- 高维度( 很大): 分母大 (),频率低。正弦波震荡得非常慢。这就像时钟的时针,走了很多步,数值才变一点点。
结论:
每一个位置 ,都会生成一个独一无二的波纹指纹。模型看到这个指纹,就能反推出:“哦,你是第 5 个词”。
原作者选择正弦函数,不仅仅是因为它有周期性,更因为一个黄金数学性质:它可以让模型学会“相对位置”。 在三角函数公式中:
这意味着:
位置 的编码,可以表示为位置 的编码的线性变换(Linear Function)。
虽然我们给的是绝对位置(第1个,第2个…),但因为这个数学性质,模型在 Attention 做矩阵乘法时,理论上能够自动推导出来:“只要知道了我在 pos,我就能轻松算出 pos+k 的特征。 这就是为什么 Google 当时认为这套方案是完美的:既给了绝对位置,又隐含了相对位置信息。
第一反应可能是: “等等,Embedding 是语义信息(比如‘猫’),P 是位置信息(比如‘第1个’)。直接把这两个向量加起来,难道不会把‘猫’的含义搞乱吗?”
答案是:不会(或者说影响可控)。
- 高维空间的稀疏性: Transformer 的维度通常很大(比如 512 或 4096)。在这个高维空间里,语义信息和位置信息往往分布在不同的子空间里。虽然数值加在一起了,但模型在训练中能学会把它们“拆”开来看。
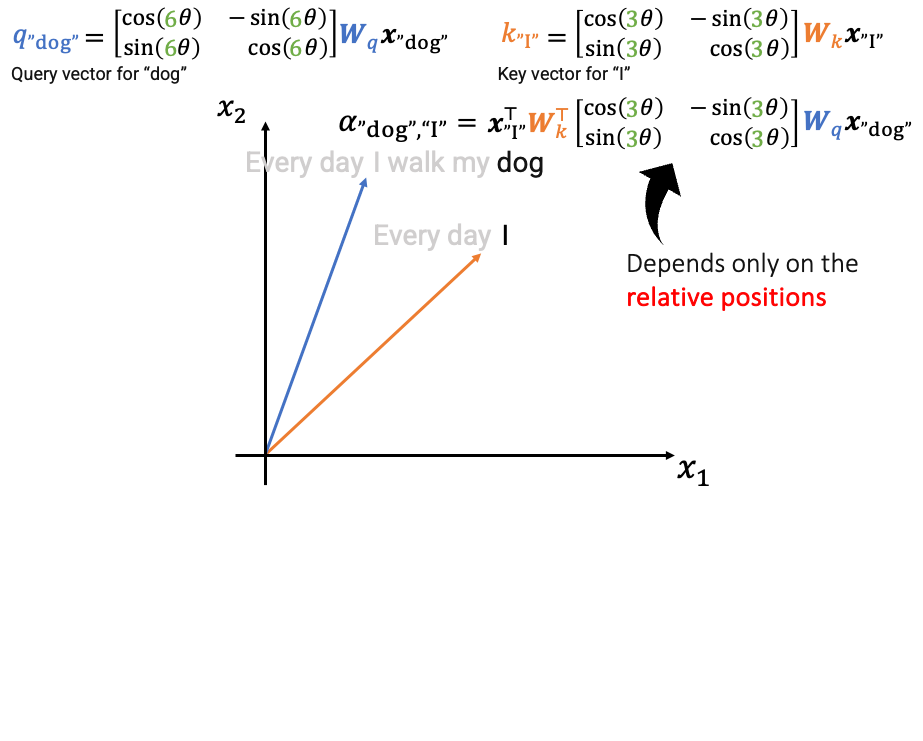
同时,Absolute Positional Encoding有个大问题是,“I walk my dog every day”和“every day I walk my dog”,这两个含义完全相同的句子,tokens却获得了全新的位置编码;因此 Relative Positional Encoding非常关键,可以帮助我们知道sequence order而无需担心它们的精确位置
PoRE(Rotary Positional Embedding)
PoRE的设的设计初衷是直接保证并利用相对位置信息,这是它相较于传统绝对位置编码(如Sinusoidal PE)的核心优势。
传统方法将位置信息“加”到词嵌入上,模型需要从绝对位置中“学习”相对关系。而PoRE的设计哲学是:让Attention分数(即和的点积)本身就只依赖于词向量内容和它们之间的相对位置,从而在机制上先天保证相对位置的建模。
这可以用一个关键公式来说明。在应用PoRE后,处于位置的词和处于位置的词,它们的点积计算结果是:
其中,和是分别由位置和决定的旋转矩阵。这个设计的精妙之处在于,利用旋转矩阵的性质(),上面的公式可以简化为:
这个最终公式清晰地揭示了PoRE的设计初衷: 词对词的注意力分数,仅仅依赖于原始的词向量投影、以及它们之间的相对位置差。
总结一下:
- 初衷: 让自注意力机制能够直接、显式地建模相对位置关系,而不是依赖模型从绝对位置中推断。
- 实现方式: 通过对每一层的和向量施加旋转变换(而非在输入层简单相加)。
- 核心公式体现: 。这个结果保证了注意力分数是词内容与相对位置的函数,完美达成了设计目标。这使得模型在处理如“I walk my dog every day”和“every day I walk my dog”这样的句子时,能更好地理解词序变化下的语义一致性。
在实现detail上, PoRE不在输入层,而在每一层的 Attention 内部。
- 传统:
Embedding + Position进入 Layer 1。 - RoPE:
Embedding变成 只对 和 进行旋转 计算 。
RoPE 的核心思想是将向量看作复数平面上的点,通过旋转角度来注入位置信息。
-
分组: 把 和 向量两两分组(比如 64 维分为 32 对)。
-
定义角度: 第 个位置的 token,旋转角度为 。
-
旋转: 对每一对数值 乘以一个旋转矩阵:
例如, RoPE 的第一步是 “切分” (Pairing):它把这个 4 维向量,切成了 2 对 双胞胎。
-
第一对双胞胎 (Pair 1): 取前两个数 。
- 这里
- 这里
-
第二对双胞胎 (Pair 2): 取后两个数 。
- 这里
- 这里
这就是 的真面目:它们就是向量里原本就有的数字,只是被我们两个两个地拎出来处理了。
第二步,计算“转速” (这是变慢的关键!)。RoPE 规定,每一对的旋转基础角度 是通过固定公式算出来的:
- (总维度)
- = 当前是第几对
1. 第 0 对 () 的转速:
结论: 第 0 对的基础转速是 1 弧度/步(约 57 度)。非常快!
2. 第 1 对 () 的转速:
结论: 第 1 对的基础转速是 0.01 弧度/步(约 0.57 度)。超级慢!
第一对每次转 57 度,像风扇一样狂转。 第二对每次只转 0.5 度,像乌龟一样挪动。这就是“频率衰减”。
现在从第一个单词开始,所以 。 我们需要旋转的总角度是:。
处理第 0 对:高速组
-
旋转角度: 弧度。
-
计算:
(查表得:)
结果: 向量从 变成了 。变化非常大!
处理第 1 对:低速组
-
旋转角度: 弧度。
-
计算:
(近似:)
结果: 向量从 变成了 。几乎没动!
我们把最终结果拼起来看:
- 原始向量:
[1.0, 0.0, 1.0, 0.0] - RoPE后向量:
[0.54, 0.84, 1.0, 0.01]
这说明了什么?
- 前两维(快针):它是“秒针”。 如果单词从位置 1 挪到位置 2,这两维的数值会剧烈跳变(比如转到负数去)。它们负责告诉模型:“我是第 1 个词,不是第 2 个词”。(区分近距离)
- 后两维(慢针):它是“时针”。 单词从位置 1 挪到位置 2,它几乎不动。只有当单词挪到第 100 个位置时,它才会转过明显的角度。它们负责告诉模型:“我在句子的前半段,不在后半段”。(区分长距离)
解决周期性问题:如果所有维度都像“秒针”一样高速旋转,那么位置和位置的编码在经过360度旋转后会变得完全相同,模型将无法区分它们。低速维的存在避免了这一点,因为它们在长距离内才会累积出显著变化,从而为超长序列中的每个位置生成一个几乎唯一的复合编码“指纹”。
实现多尺度感知:模型可以同时利用不同频率的维度。当判断两个词是否相邻时,它更依赖高速维的显著差异;当判断两个词是否属于同一个长段落或章节时,它则参考低速维的相似性。
同时,RoPE技术还跟Training Context Length有很大的关系,这部分我们详细见:RoPE_detail
Transformer Arch
Encoder-Decoder
2017 年《Attention is All You Need》论文中的原始形态,最初是为机器翻译设计的。
- *Encoder(编码器): 负责“理解”。它通过多层 Self-Attention 查看整个输入句子,把每个词转化成包含上下文信息的向量。
- Decoder(解码器): 负责“生成”。它比 Encoder 多了一个 Cross-Attention(交叉注意力) 层。
- Cross-Attention: Decoder 会拿着自己已经生成的词,去询问 Encoder:“原文里哪些信息对我生成下一个词最重要?”
- 输入端: Input Embedding + Positional Embedding Encoder。
- 中间桥梁: Encoder 输出的“特征矩阵”被送往 Decoder 的每一层。
- 输出端: Decoder 结合已生成的词和 Encoder 的信息,逐个预测下一个词。
Encoder-only & Decoder-only
随着研究深入,人们发现这两个模块其实可以拆开单独使用,这也开启了 NLP 的两个大时代。
Encoder-only (代表作:BERT)
- 结构: 只保留左半边。
- 特点: “全向看”。计算某个词时,它能看到句子中左边和右边所有的词。
- 擅长: 文本分类、命名实体识别、阅读理解。因为它能透彻地理解上下文,但由于它“预知了未来(看到了右边的词)”,所以很难用来做流畅的文本生成。
Decoder-only (代表作:GPT 系列)
- 结构: 只保留右半边,但去掉了 Cross-Attention(因为没有 Encoder 了)。
- 特点: “向左看”。由于使用了 Masked Self-Attention(掩码自注意力),它在生成第 个词时,只能看到前 个词。
- 擅长: 预测下一个词。
LLM:Decoder-only?
从 BERT(Encoder-only)统治世界到 GPT(Decoder-only)一统江湖,主要有以下几个深层原因:
A. 训练效率与规模化(Scalability)
Encoder-Decoder 结构虽然强大,但参数量分布在两个模块中。研究发现,将所有参数集中在一个统一的 Decoder 架构下,模型在海量数据上的学习效率更高。随着参数规模达到千亿级,Decoder-only 展现出了更强的涌现能力(Emergent Abilities)。
B. 任务的统一性
LLM 的本质是“文本续写”。
- Encoder-only 适合判别任务,但生成能力弱。
- Encoder-Decoder 适合翻译,但在处理复杂的开放式对话、逻辑推理时,Encoder 的预处理有时反而限制了模型生成的自由度。
- Decoder-only 把一切任务(翻译、分类、代码、创作)都转化成了“预测下一个词”。这种极简的逻辑在工程实现上极其稳定。
C. 零样本推理(Zero-shot Learning)
Decoder-only 架构在预训练阶段就是在做“根据上文填空”。这让它天然适应 Prompt(提示词)模式。你给它一段指令,它会自然而然地沿着指令往下补全,这种特性是 BERT 等模型很难模拟的。
Interview-Question
为什么 Scaling 要除以 ?
为了“防止梯度消失”,稳定梯度。
主要原因是因为Softmax的函数特性,如果不除以 ,会造成点积爆炸;假设 and 的维度 () 很大,比如 512。 当我们在做点积 () 时,是在将 512 个数字相乘再相加,会导致数值范围变得非常大。
Softmax函数公式是,对输入的数值大小非常敏感;例如[20,30], ,权重:;
Softmax 的分布变得像“独热编码 (One-hot)”一样极端。其中一个不仅拿走了所有权重,而且在数学上,Softmax 函数在趋近于 0 或 1 的位置,导数(梯度)趋近于 0。
以至于为什么要除以,假设 和 中的每个元素都是均值为 0,方差为 1 的随机变量。它们的点积 。根据统计学规律,如果你把 个方差为 1 的数加起来,结果的方差会变成 。这意味着点积结果的标准差变成了 ,因此需要把结果除以标准差,让数值保持在 Softmax 喜欢的“舒适区”。
为什么要使用softmax归一化weight matrix?
但 Softmax 最终成为了 Transformer 的标准配置,主要原因不是因为它“好算”,而是因为它具备一个简单的归一化(Sum)无法提供的核心特性:“赢家通吃” (Winner-Take-All) 的倾向性,同时又保持了可导性。
1.核心差异:放大信号,抑制噪声
注意力机制的本质是**“查字典”。当我在找东西时,我希望找到那个最匹配的,而忽略掉那些一般般**的。
假设我们算出来的 Score 是:[10, 9, 2]。
- 10 是最相关的(目标)。
- 9 是干扰项(只差一点点)。
- 2 是完全不相关的背景噪声。
方案 A:直接按和分配 (Linear Normalization)
我们把它们加起来:。
然后算权重:
结果: 0.48 和 0.43 几乎没有区别!模型会变得**“犹豫不决”**。它混入了大量干扰项(9)的信息,导致最终提取出的特征变得模糊。
方案 B:Softmax
我们计算 :
- 总和
权重:
结果:
- 拉开差距: 原始分数只差 1 (10 vs 9),经过 Softmax 后,权重差距变成了近 3 倍 (0.73 vs 0.27)。Softmax 敏锐地放大了“稍微好一点”的那个选项。
- 降噪: 那个得分为 2 的噪声,被彻底压到了 0。
结论: Softmax 是一种 “软性的最大值” (Soft Maximum)。它让模型能够聚焦 (Focus)。如果用简单的 Sum,模型就变成了“雨露均沾”,失去了注意力的意义。
2. 数学上的必须性:非负性 (Positivity)
“直接根据 Sum 来分配 weight”,公式大概是 。这里有一个巨大的隐患:点积算出来的 Score 可以是负数!
- 如果 ,,点积是 。
- 如果你的 Score 列表是
[10, -5, -8]。 - 求和是 。
- 第一项的权重变成 。
权重变成了负数? 这在注意力机制里解释不通。我们要的是“加权平均”,通常要求权重必须是正的且和为 1(凸组合),这样才能保证输出的向量 不会飞出原本的特征空间。
Softmax 的优势:
永远是正数。不管你的点积算出 还是 ,Softmax 都能把它变成一个正的概率值(虽然很小),保证了加权求和在数学上的稳定性。
3. 梯度的“选拔”作用
你说 Softmax 导致梯度需要缩放(防止梯度消失),这是它的缺点。但反过来看,Softmax 的梯度特性正是它能训练出好模型的关键。
Softmax 的导数特点是:只有当两个分数的竞争非常激烈时,梯度才最大。
- 如果一个是 100,一个是 0(胜负已分),Softmax 认为不需要调整了,梯度趋近 0。
- 如果一个是 10,一个是 9.9(难分伯仲),Softmax 会产生很大的梯度,告诉前面的层:“嘿,你得把这两个区分开!去更新权重,让 10 变得更大,让 9.9 变得更小!”
这种机制迫使模型去学习如何区分相似的词,而不是仅仅记住一堆平均值。
4. 总结
为什么一定要 Softmax,哪怕要为了它专门搞一个 Scaling?
- 非线性 (Non-linearity): 神经网络需要非线性才能拟合复杂函数。单纯的除以 Sum 是线性变换,能力有限。
- 聚焦 (Selectivity): Softmax 能把微小的分数差异放大,让模型敢于“做决定”,关注最重要的那个词。
- 非负性 (Positivity): 解决了点积出现负数时权重分配的数学灾难。
- 可导的 Hardmax: 我们其实最想要的是
Hardmax(只取最大的那个,其他全为0),但 Hardmax 不可导。Softmax 是我们能找到的、最接近 Hardmax 且处处可导的完美替代品。
所以,Scaling () 就像是我们要使用 Softmax 这把“利剑”所必须支付的“保养费”。为了它的聚焦能力,这个代价是值得的。
什么是LayerNorm,什么是BatchNorm,为什么Transformer选择LayerNorm的做法,而CNN选择BatchNorm?
1. 什么是 BatchNorm (批归一化)?
BatchNorm 是在批次维度 (Batch Dimension) 上进行归一化。对于一个批次 (Batch) 的数据:
- 操作对象:对 同一个特征通道,计算该批次内所有样本的均值和方差,然后用这个统计量来归一化该通道的所有值。
- 直观理解:假设你的批次有 N 个句子,每个句子的词向量是 D 维。BatchNorm 会独立处理这 D 维中的每一维(比如第1维,代表“名词性”)。它会收集这 N 个句子中所有词的第1维数值,算出均值和方差,然后对这 N 个句子的所有词的第1维进行归一化。
- 公式(对于某个特征维度): 其中 和 是当前批次在该维度上的均值和方差。
- 优点:
- 减少内部协变量偏移:使每一层的输入分布更稳定,加速训练。
- 有一定的正则化效果:因为使用批次统计量,引入了噪声。
- 缺点:
- 依赖批次大小:在小批次(Batch Size)下统计量不准确,影响性能。
- 不适合动态序列:在 RNN 或 Transformer 中,序列长度可能变化,不同位置(时间步)的统计量可能不同,用同一个批次统计量归一化所有位置不合理。
2. 什么是 LayerNorm (层归一化)?
LayerNorm 是在特征维度 (Feature Dimension) 上进行归一化。对于单个样本(例如一个词向量或一个序列):
- 操作对象:对 单个样本,计算其所有特征维度的均值和方差,然后用这个统计量来归一化该样本的所有特征值。
- 直观理解:对于序列中的一个词向量(D 维),LayerNorm 会计算这个词向量本身 D 个数值的均值和方差,然后用它们来归一化这个词向量。它不关心批次中其他样本的情况。
- 公式(对于单个样本/词向量): 其中 和 是该样本所有特征维度的均值和方差。
- 优点:
- 不依赖批次大小:统计量在单个样本上计算,因此训练和推理时行为一致,不受批次大小影响。
- 适合序列模型:对变长序列友好,每个时间步(词)独立归一化。
3. 为什么Transformer选择LayerNorm的做法,而CNN选择BatchNorm
CNN选择BatchNorm,Transformer选择LayerNorm,是由它们各自处理的“数据特性”和“架构需求”共同决定的。
下图直观地展示了这一核心差异:
flowchart TD
A[输入数据] --> B{数据维度与结构}
B --> C[图像数据<br>(CNN处理)]
B --> D[序列数据<br>(Transformer处理)]
C --> E[特点:固定网格结构<br>同一特征图在不同位置分布相似]
D --> F[特点:可变长度序列<br>不同位置统计特性差异大]
E --> G[核心需求:跨样本统一特征分布<br>(让不同图片的“边缘”特征可比)]
F --> H[核心需求:样本内特征稳定<br>(让每个词向量的不同维度可比)]
G --> I[选择:BatchNorm<br>沿批次维度归一化]
H --> J[选择:LayerNorm<br>沿特征维度归一化]
I --> K[完美契合CNN<br>稳定训练,提供正则化]
J --> L[完美契合Transformer<br>长度无关,稳定注意力机制]
下面我们来详细拆解这背后的原因:
核心差异:处理的数据结构不同
| 维度 | CNN(图像) | Transformer(序列) |
|---|---|---|
| 数据形状 | [Batch, Channels, Height, Width] | [Batch, Sequence_Length, Feature_Dim] |
| 核心特性 | 空间不变性 (Spatial Invariance) | 序列可变性 (Variable Length) |
| 任务焦点 | 识别特征(如边缘、纹理),这些特征在不同图片、不同位置应具有一致的统计分布。 | 理解关系(词与词、token与token之间的关系),每个位置的上下文都独一无二。 |
为什么CNN钟爱BatchNorm?
- 数据特性匹配:对于一张图片,CNN的每个通道(例如,一个检测“垂直边缘”的滤波器)的输出,在整张图片的不同位置(如左上角和右下角)理论上应该服从相似的分布。BatchNorm沿批次维度对每个特征通道进行归一化,正是利用了这一点:它假设“批次中所有图片的‘垂直边缘’特征图,其分布是相似的”。这种跨样本的归一化能有效加速训练。
- 输入尺寸固定:图像任务通常将图片缩放到固定尺寸(如224x224),因此
Height和Width维度是确定的。这使得跨批次计算同一空间位置(尽管不常见)或同一通道的统计量变得可行且稳定。 - 正则化效应:BatchNorm在训练时使用当前批次的统计量,在推理时使用移动平均的统计量。这种不一致性无意中引入了一种噪声,起到了轻微的正则化效果,有助于防止过拟合,这在图像分类任务中非常有益。
- 稳定卷积输出:卷积层的输出值范围会受到权重初始化和输入数据的很大影响。BatchNorm通过强制每个通道的激活值具有零均值和单位方差,为后续层提供了稳定、标准化的输入,极大缓解了梯度问题。
简单比喻:CNN像是一个工厂的质检员,用同一套标准(BatchNorm统计量)去检查不同产品(批次中的不同图片)的同一个零件(特征通道)是否符合规格。
为什么Transformer依赖LayerNorm?
- 处理可变长序列:这是最根本的原因。文本序列长度千差万别。如果使用BatchNorm,就需要对批次中所有序列的第1个位置、第2个位置…… 分别计算均值和方差。但短序列的尾部是填充符(Padding),长序列的中间位置语义复杂,这些位置的统计量混合在一起毫无意义,会严重破坏模型性能。
- 样本独立计算:LayerNorm对每个序列、每个词向量(Token) 独立进行归一化。它计算的是一个词向量所有维度(如512维)的均值和方差。这完美避开了序列长度和批次大小的影响,使得训练和推理过程完全一致,非常稳定。
- 与自注意力机制协同:自注意力机制的核心是计算 点积和 Softmax。这些操作对输入向量的幅度(Scale) 非常敏感。LayerNorm确保输入到自注意力层的每个词向量都被归一化到相似的尺度,为注意力权重的动态计算提供了一个稳定的起点,防止梯度爆炸或消失。
- 适合自回归生成:在推理时,Transformer(尤其是Decoder)通常是逐个Token生成的(批次大小可能为1)。BatchNorm在单样本下的统计量毫无意义,而LayerNorm在任何情况下都能正常工作。
简单比喻:Transformer像是一位同声传译,它必须独立地、即时地处理每一句 incoming speech(每个序列),并专注于理清这句话内部各个词语(每个词向量的各个维度)之间的关系,而无暇顾及之前其他句子的情况。
总结对比表
| 考量因素 | CNN (使用 BatchNorm) | Transformer (使用 LayerNorm) |
|---|---|---|
| 数据假设 | 同一特征在不同样本、不同位置分布相似 | 每个序列、每个位置的上下文都独特 |
| 长度处理 | 输入尺寸固定,无需处理变长 | 必须优雅地处理可变长序列 |
| 批次依赖 | 依赖足够大的批次以获得准确统计量 | 完全独立于批次大小,小批次或单样本均可 |
| 与架构协同 | 稳定卷积层输出,配合其空间不变性 | 稳定自注意力计算,匹配其动态权重特性 |
| 推理一致性 | 训练/推理统计量不同,需用移动平均 | 训练/推理行为完全一致 |
结论:BatchNorm和LayerNorm的“分工”是深度学习中的一个经典范例。它告诉我们,没有“最好”的技术,只有“最合适”的技术。CNN因其处理具有空间不变性的网格数据的特性而与BatchNorm联姻;Transformer因其处理长度可变、关系复杂的序列数据的使命而与LayerNorm结盟。这种选择是数据特性、计算需求和架构设计三者完美契合的结果。
Tiny Transformer Lab
前面公式和图看多了之后,最容易卡住的点其实是:这些矩阵到底是怎么一层一层流过去的。
所以这里放一个很小的 toy forward pass。权重都是手写死的,不训练,只是把 tokens, embedding, Q/K/V, causal attention, residual, layernorm, MLP, logits 这些中间结果摊开看一遍。